5.1 2D
1. Mapping
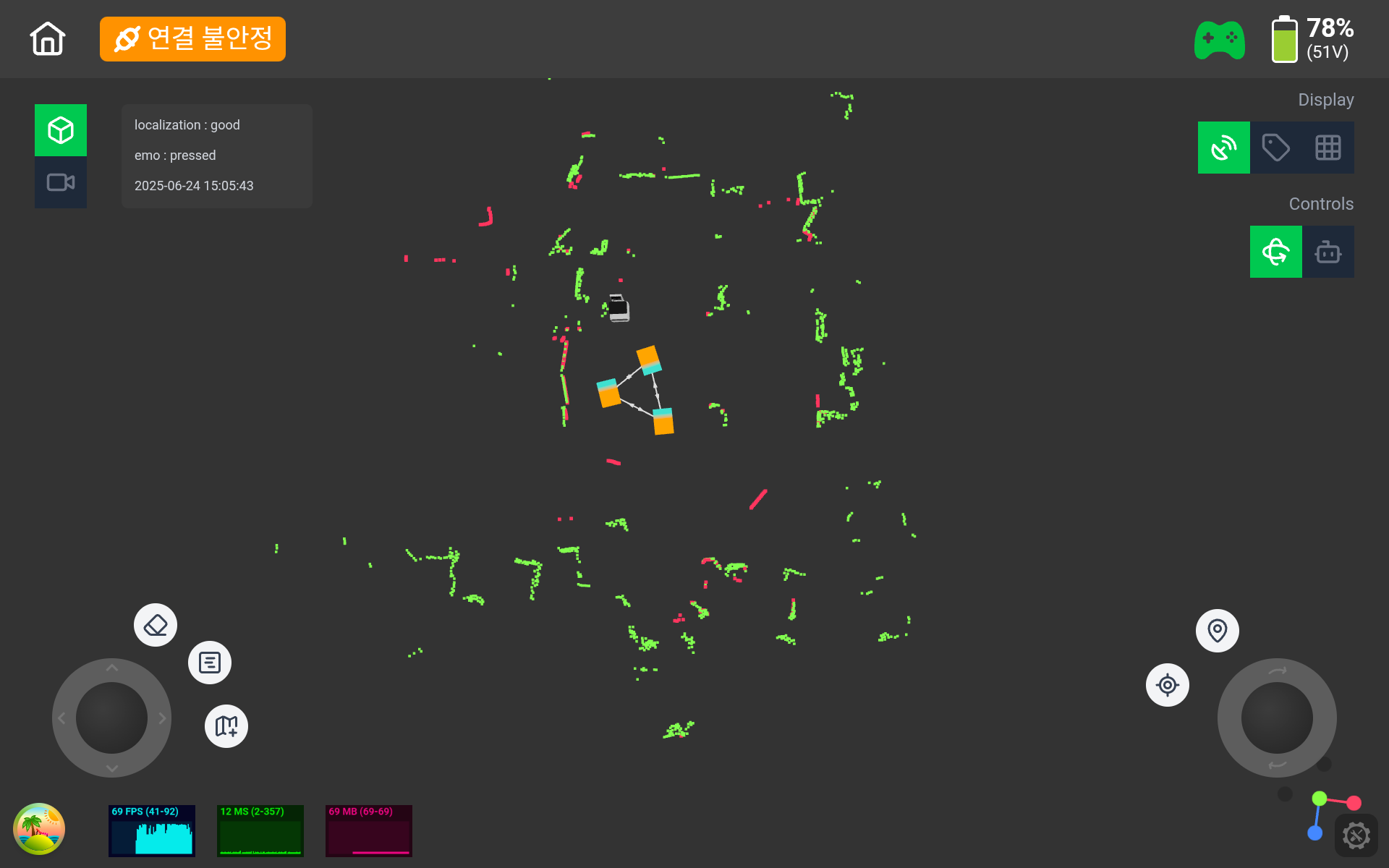
- 2D Mapping 2D Mapping
2. Annotation
🔧 로봇 지도 내 이동 위치 지정(annotation)이란?
로봇이 갈 수 있는 위치를 지정해 주는 내용입니다.
로봇이 실제 환경에서 자율적으로 이동하거나 작업을 수행하려면, 맵(Map) 상에서 이동 경로와 목적지를 이해할 수 있어야 합니다. 이때 맵에 대해 노드(Node) 와 엣지(Edge) 를 정의하고 연결해주는 작업을 어노테이션(annotation) 이라고 부릅니다.
🧭 어노테이션 작업의 주요 요소
1. 노드(Node) 정의
- 노드는 로봇이 도달해야 하는 지점(장소) 을 의미합니다.
- 예시: 복도 중간, 문 앞, 작업대 앞, 엘리베이터 앞 등
- 노드는 일반적으로 맵 위에 좌표(x, y) 나 세부 위치 명칭으로 표시합니다.
✅ 작업 예시:
- “노드 A: 회의실 문 앞 (x=3.2, y=5.6)”
- “노드 B: 주방 중앙 (x=10.1, y=7.3)”
2. 엣지(Edge) 연결
- 엣지는 두 노드를 연결하는 경로입니다.
- 로봇이 A 지점에서 B 지점으로 갈 수 있는 경로를 나타내며, 엣지에는 방향성, 거리, 이동 가능 여부 등의 정보가 포함될 수 있습니다.
✅ 작업 예시:
- “엣지 A-B: 양방향, 길이 4.3m, 통과 가능”
- “엣지 B-C: 단방향, 엘리베이터 이용 필요”
✍️ 어노테이션의 목적
- 경로 계획(Path Planning): 로봇이 목적지까지 가장 효율적인 경로를 계산할 수 있게 함
- 충돌 방지: 로봇이 이동할 수 없는 경로나 위험 구간을 피할 수 있음
- 작업 할당: 특정 노드에서만 수행할 수 있는 작업들을 지정 가능(Zone 등)
🛠️ 이동 위치 지정 방식 예시
WEB 기반 툴: WEB 페이지에 작성된 맵 위에 직접 노드와 엣지를 그리는 방식