4.7 로봇 위치 추정(Localization)
로봇 위치 추정 기능은 로봇의 현재 위치를 LiDAR 지도를 기준으로 정확히 보정하는 도구입니다.
헬퍼 배치 → 위치 추정 → 검증 → 종료 의 네 단계로 진행되며, 필요할 때마다 재보정할 수 있습니다.
화면 구성
| 번호 | 요소 | 설명 |
|---|---|---|
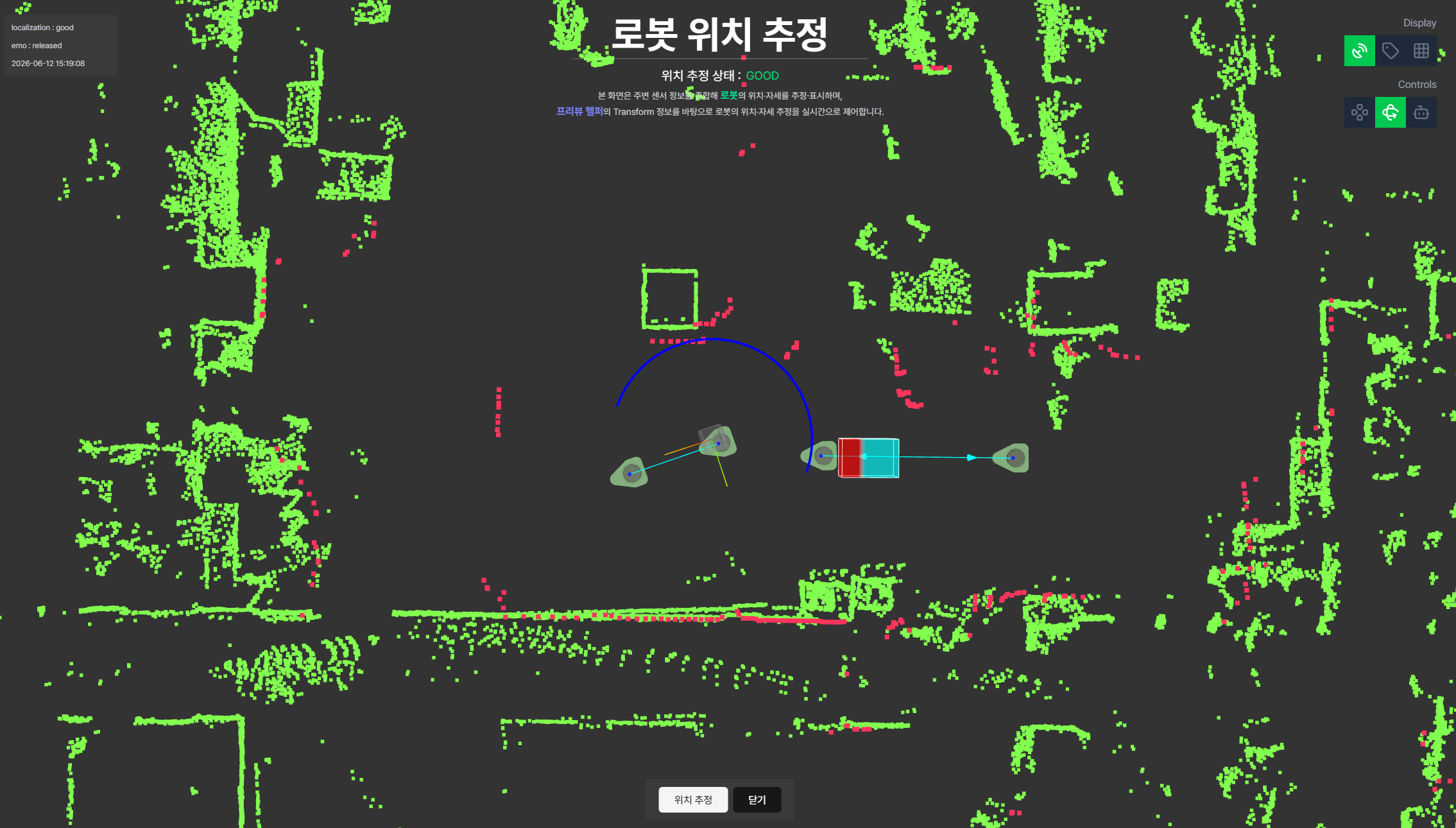
| ① | 타이틀 | 위치 추정 — 현재 모드(Localization)를 명확히 표기하는 중앙 헤드라인 |
| ② | 가이드 문구 | Localization 절차·버튼 용도를 요약 안내. 헬퍼 배치 → 위치 추정 → 검증 → 닫기 순서를 강조 |
| ③ | 액션 패널 | 📍 위치 추정 / ❌ 닫기 — 두 개 버튼이 일렬로 배치된 플로팅 컨트롤 영역 |
액션 패널은 ① 타이틀과 ② 가이드 하단, 뷰포트 중앙에 고정되어
추정 진행 중에도 시야를 가리지 않으면서 즉시 접근 가능합니다.
사용 절차
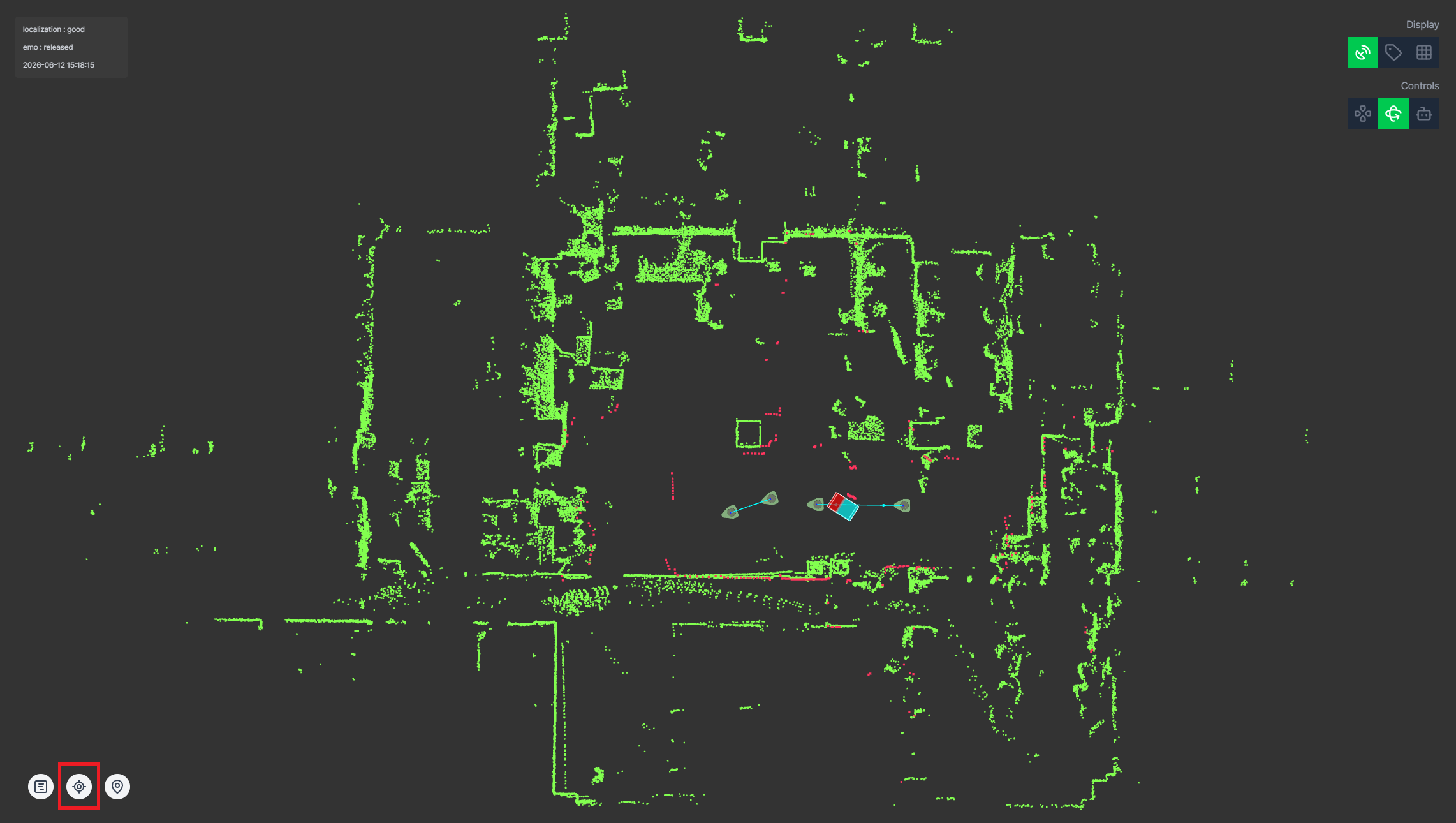
- 로봇 위치 추정 아이콘 📍 (좌측 하단) 클릭 → Localization 인터페이스 활성화
- 프리뷰 헬퍼 배치
- 마우스 좌클릭 또는 한 손가락 터치로 포즈(
x y z θ)를 조정합니다.
- 마우스 좌클릭 또는 한 손가락 터치로 포즈(
- [위치 추정] 버튼 클릭
- 추정 엔진이 헬퍼 포즈를 초기값으로 삼아 위치 보정을 수행합니다.

- 추정 엔진이 헬퍼 포즈를 초기값으로 삼아 위치 보정을 수행합니다.
- 결과 확인
- 컬러 로봇이 헬퍼 위치로 스냅되고, 상태 카드가
good이면 성공입니다.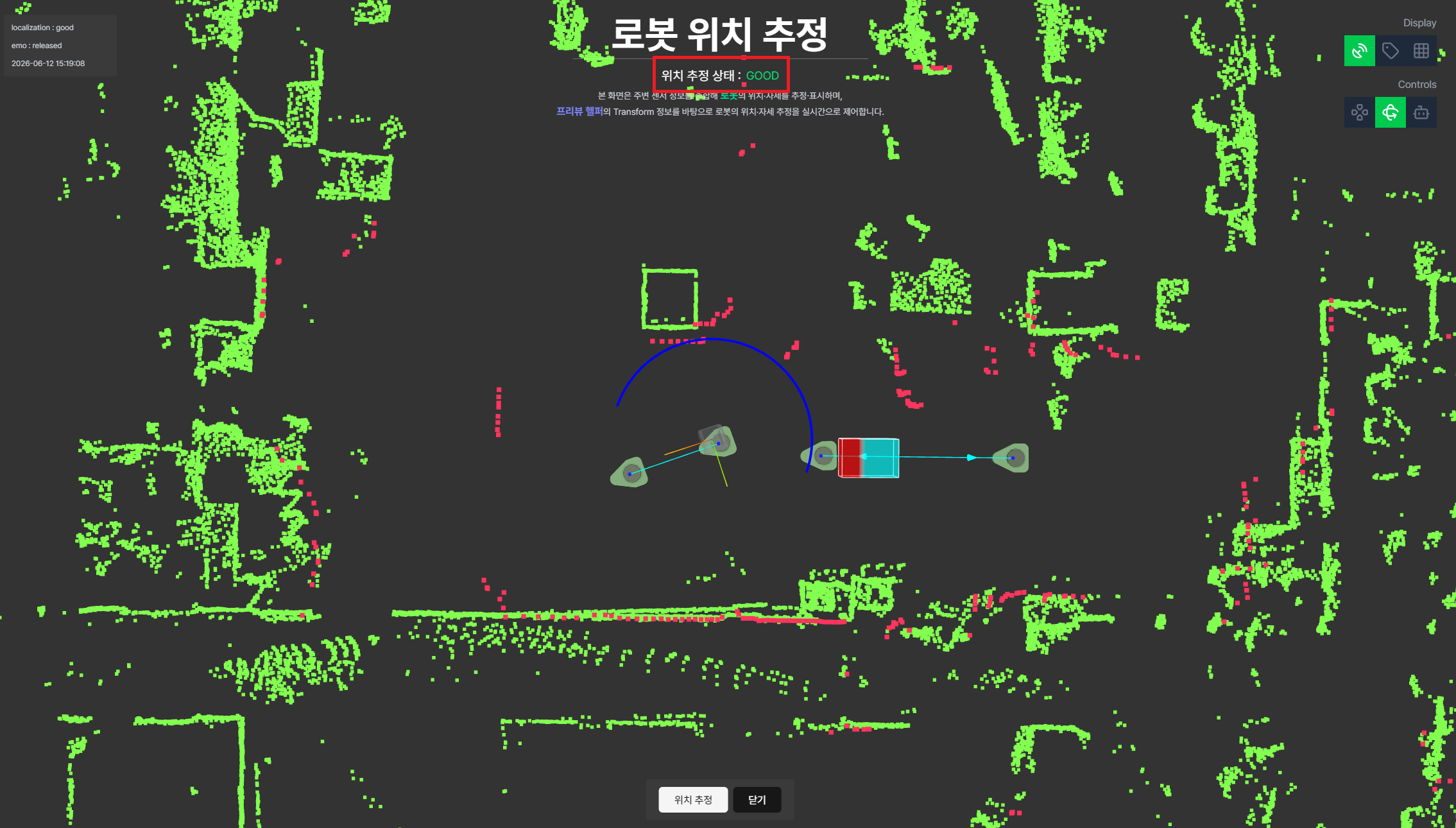
- 컬러 로봇이 헬퍼 위치로 스냅되고, 상태 카드가
- [닫기] 버튼을 누르면 편집 모드 로 복귀합니다.
주요 버튼 설명
| 버튼 | 동작 |
|---|---|
| 📍 위치 추정 | 현재 헬퍼 포즈를 기반으로 위치 보정 |
| ❌ 닫기 | Localization 모드 종료 |
팁 & 주의 사항
- 상태 카드 지표
- good : 정상 운용 가능
- fail : 수렴 실패 → 주변 장애물 제거 후 재시도
- none : 미실행 → [위치 추정] 버튼으로 시작
- 헬퍼를 정확한 기준점(예: 눈에 띄는 모서리) 위에 배치하면 보정 성공률이 높아집니다.