4.2 인터페이스
시스템 개요
본 시스템은 로봇 상태를 실시간으로 모니터링하고 관리하기 위한 인터페이스를 제공합니다.
로봇의 전원 상태, 전압 및 전류 정보, 모터의 연결 상태 및 온도 정보를 확인할 수 있습니다.
화면 구성 및 기능 설명

- 톱니바퀴 버튼을 누르면 세팅 페이지로 진입합니다.
0. 상태 메뉴
- 좌측 사이드바에서 상태 항목을 선택하면 로봇의 실시간 상태 정보를 확인할 수 있습니다.
1. 로봇 상태 표시 탭
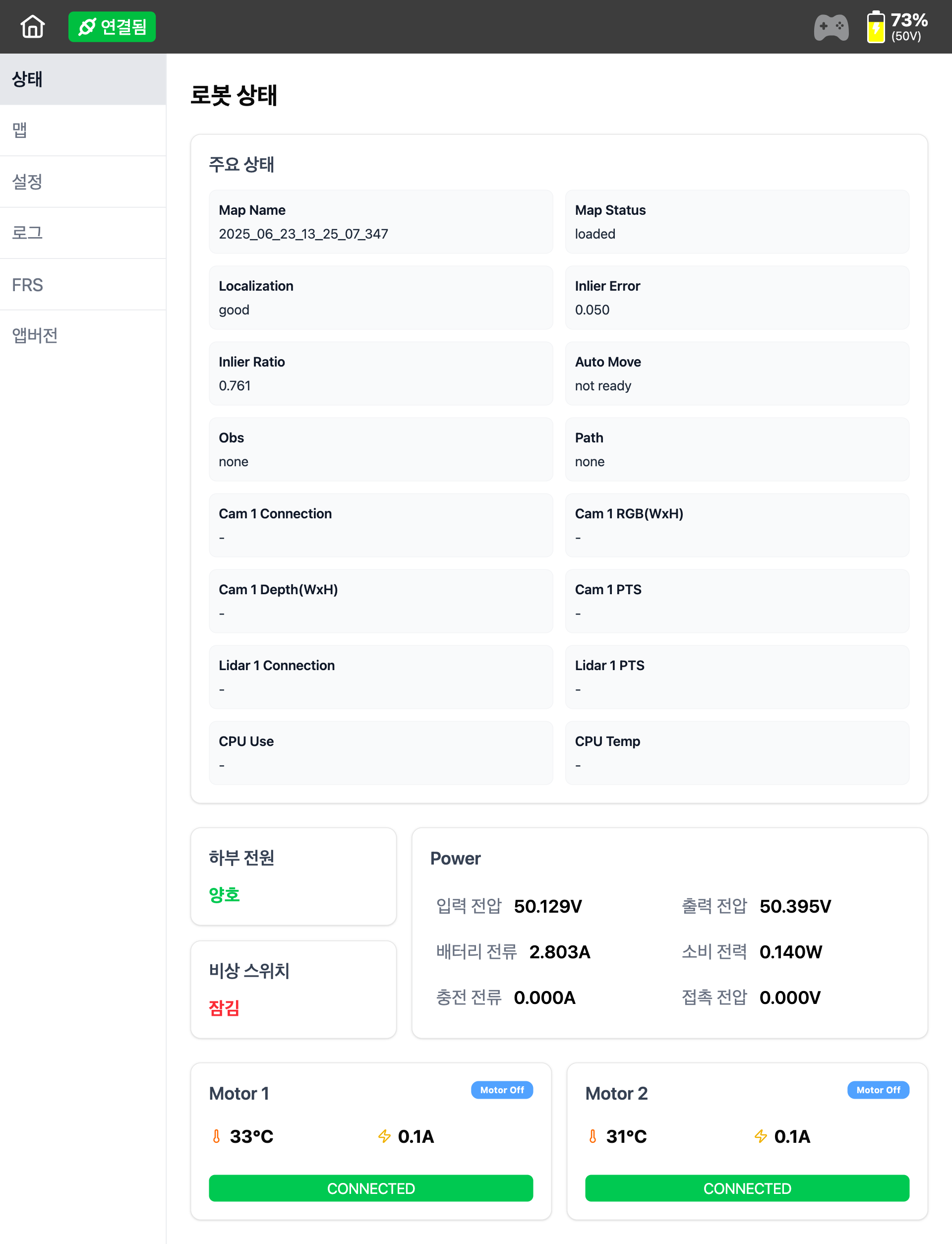
다음 항목들의 상태가 실시간으로 표시됩니다.
| 항목 | 설명 |
|---|---|
| 하부 전원 | 로봇의 하부 전원 상태를 표시합니다. - 정상 (초록색): 정상 작동 중 - 이상 (빨간색): 작동 이상 |
| 비상 스위치 | 로봇의 비상 정지 상태를 표시합니다. - 잠김 (빨간색): 비상 정지 상태 - 해제됨 (초록색): 정상 작동 가능 |
1.1 전력 정보
다음과 같은 전력 관련 정보가 표시됩니다.
| 항목 | 설명 |
|---|---|
| 입력 전압 | 시스템에 공급되는 입력 전압 (V) |
| 출력 전압 | 시스템에서 출력되는 전압 (V) |
| 배터리 전류 | 배터리에서 방전 또는 충전되는 전류량 (A) |
| 소비 전력 | 현재 소비 중인 전력량 (W) |
| 충전 전류 | 배터리에 충전되는 전류량 (A) 충전 중이 아닐 경우 0으로 표시됨 |
| 접촉 전압 | 접촉부 전압 상태 (V) 접촉이 없을 경우 0으로 표시됨 |
1.2 모터 상태 정보
각 모터별 상태가 개별적으로 표시됩니다.
| 항목 | 설명 |
|---|---|
| Motor 1, Motor 2 | 각 모터의 온도 및 연결 상태를 표시합니다. - 온도: 섭씨(℃)로 표시됨 - 배터리 전류: 암페어(A)로 표시됨 - 연결 상태: CONNECTED (초록색), DISCONNECTED (회색) - 모터 상태: Motor On / Motor Off |
1.3 상태 메시지 및 대응 방법
다음과 같은 상태 발생 시 다음의 조치를 취합니다.
| 상황 | 조치 방법 |
|---|---|
| 하부 전원 이상 | 전원 공급 장치, 배선 및 연결 상태 점검 |
| 비상 스위치 잠김 | 비상 정지 스위치 해제 및 정상 작동 여부 확인 |
| 모터 온도 80℃ 초과 | 모터 가동을 중지하고 충분히 냉각 후 재시작 |
2. 맵 표시 탭
맵 탭에서는 현재 사용 중인 맵 정보를 확인하고 다른 맵으로 변경할 수 있습니다.
2.1 맵 설정
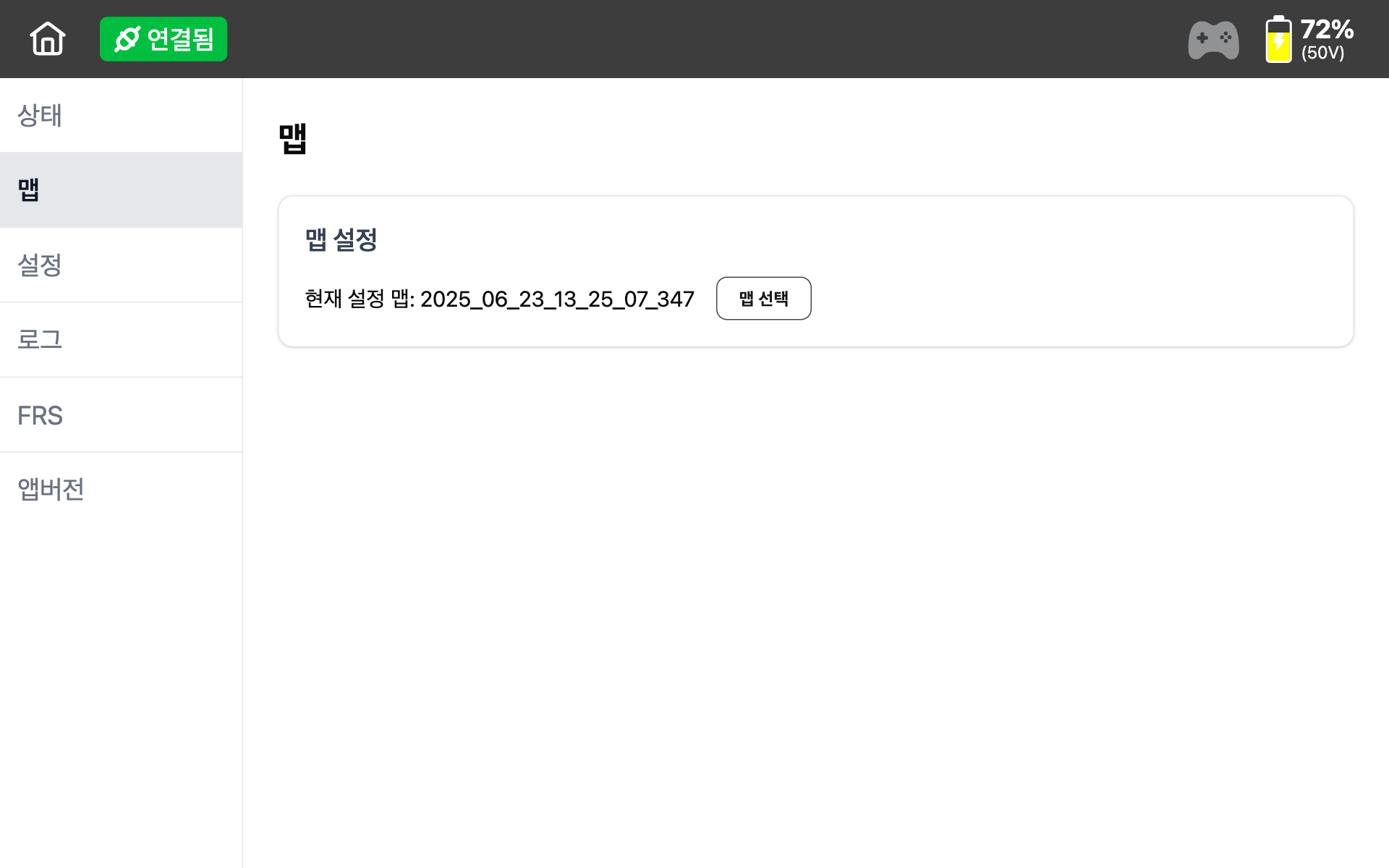
- 화면 중앙에는 현재 설정된 맵 이름이 표시됩니다.
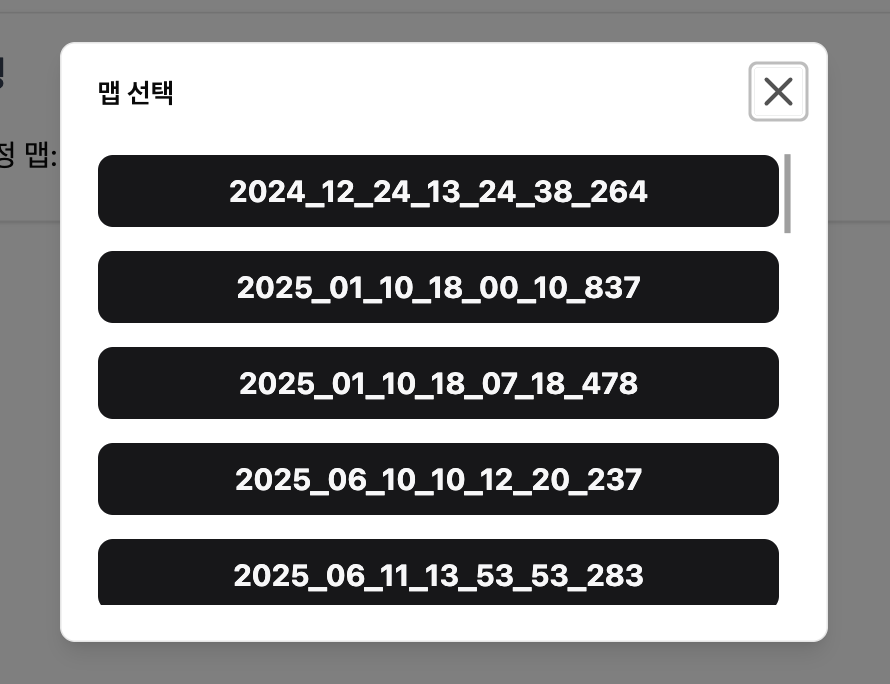
- [맵 선택] 버튼을 클릭하여 원하는 맵 목록을 불러올 수 있습니다.
- 맵 선택 후 로봇의 경로, 위치, 주행 영역 등이 해당 맵을 기준으로 업데이트됩니다.
| 항목 | 설명 |
|---|---|
| 현재 설정 맵 | 시스템에 현재 적용된 맵 파일 이름이 표시됩니다. 예: 250414_unicos_test |
| 맵 선택 버튼 | 다른 맵을 선택하여 시스템에 반영할 수 있습니다. |
⚠️ 맵을 변경하면 이전 맵 기준으로 설정된 경로 및 노드 정보가 초기화될 수 있으니 주의가 필요합니다.
3. 설정 탭
설정탭은 로봇의 세부적인 설정값을 변경하는 기능을 제공합니다.- 초기 화면에서는 로봇 기본 정보를 수정할 수 있습니다.
- 비밀번호를 입력 시 상세한 설정을 수정할 수 있습니다.
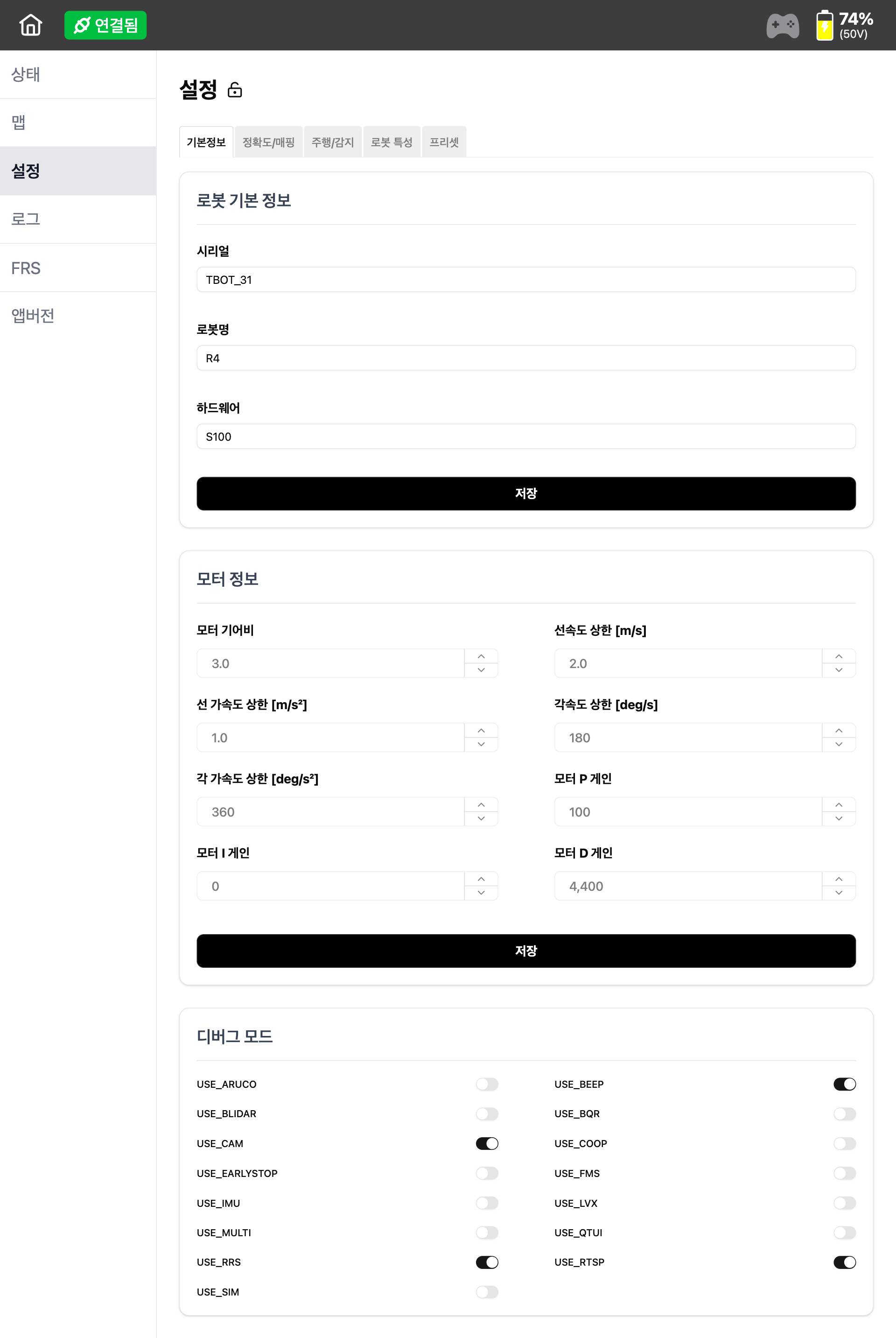
3.1 기본정보
- 시리얼, 로봇명, 하드웨어명을 수정할 수 있습니다.

- 자물쇠 아이콘을 누르면 비밀번호 입력창이 표시됩니다.
- 모터 정보, 디버그 모드가 추가로 노출됩니다.
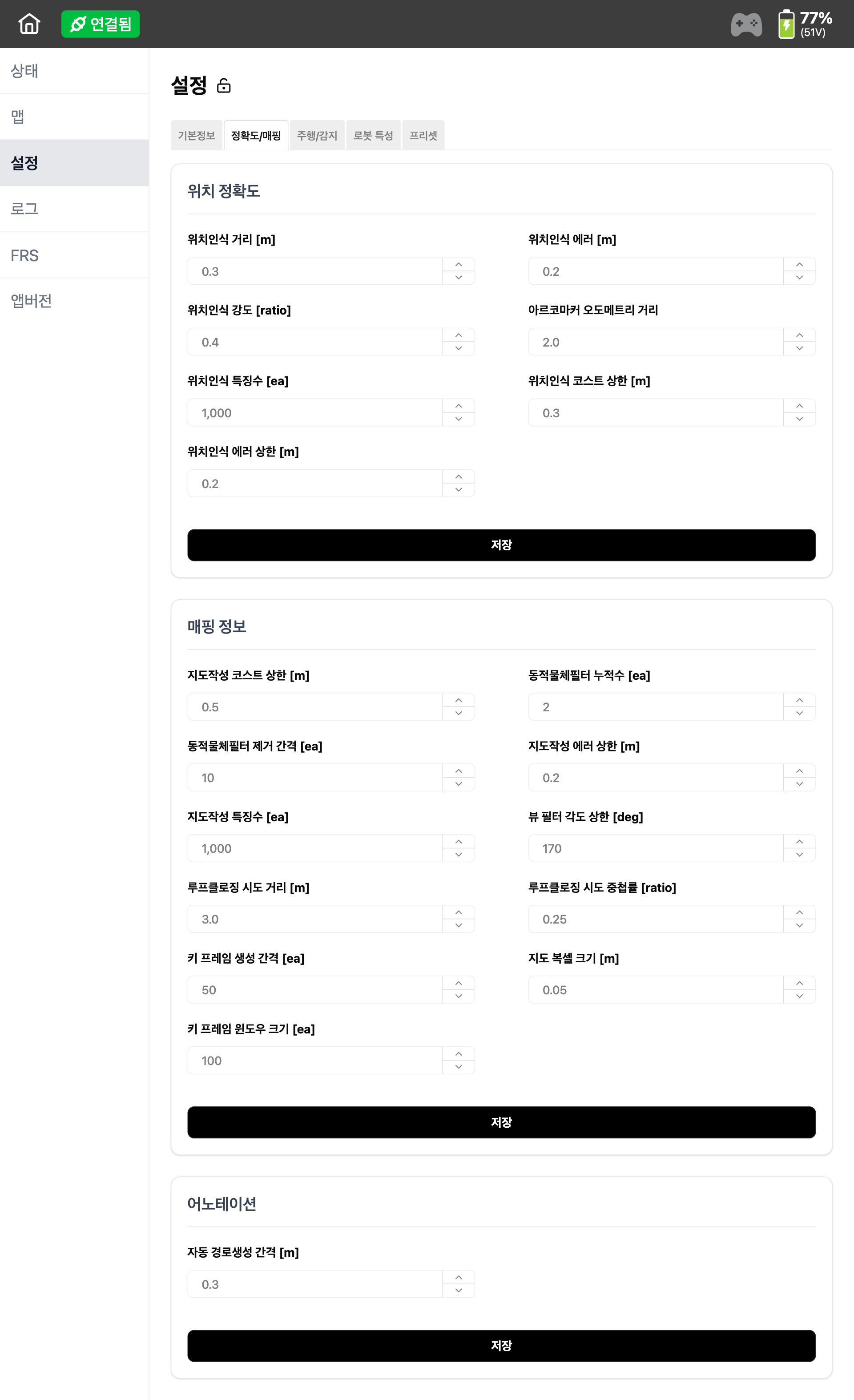
3.2 정확도/매핑
- 위치 정확도, 매핑 정보, 어노테이션 관련 값을 수정할 수 있습니다.
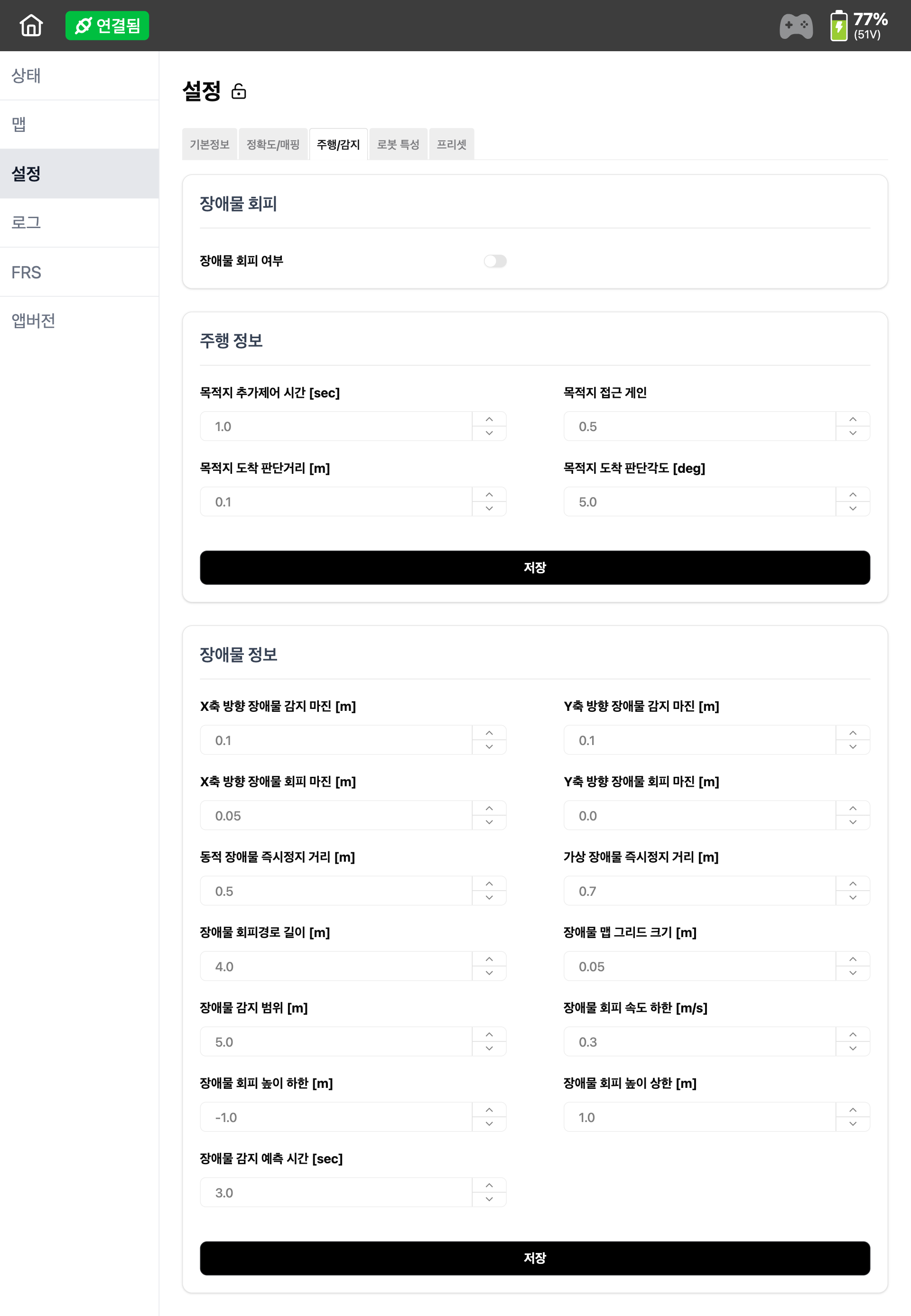
3.3 주행/감지
- 장애물 회피, 주행 정보, 장애물 정보 관련 값을 수정할 수 있습니다.
3.4 로봇 특성
- 로봇 제원, LiDAR 제원, 카메라 제원 관련 값을 수정할 수 있습니다.

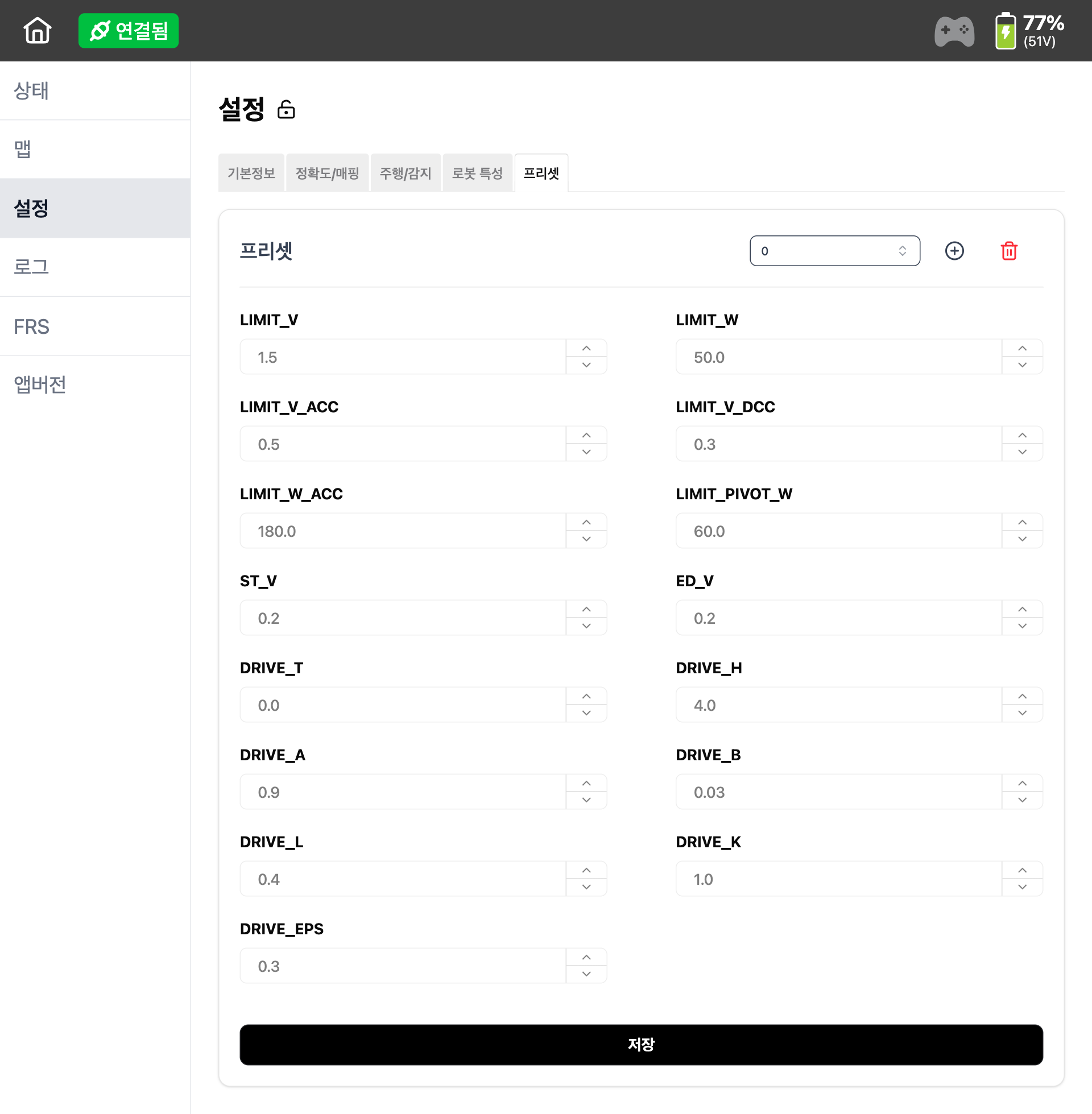
3.5 프리셋
- 세부 주행 설정을 위한 프리셋입니다.
- 추후 여러 개의 프리셋을 생성/수정하는 기능을 추가 예정입니다.
4. 로그 탭
로그 탭은 시스템에서 발생한 다양한 로그 데이터를 확인하고 필터링할 수 있는 기능을 제공합니다.
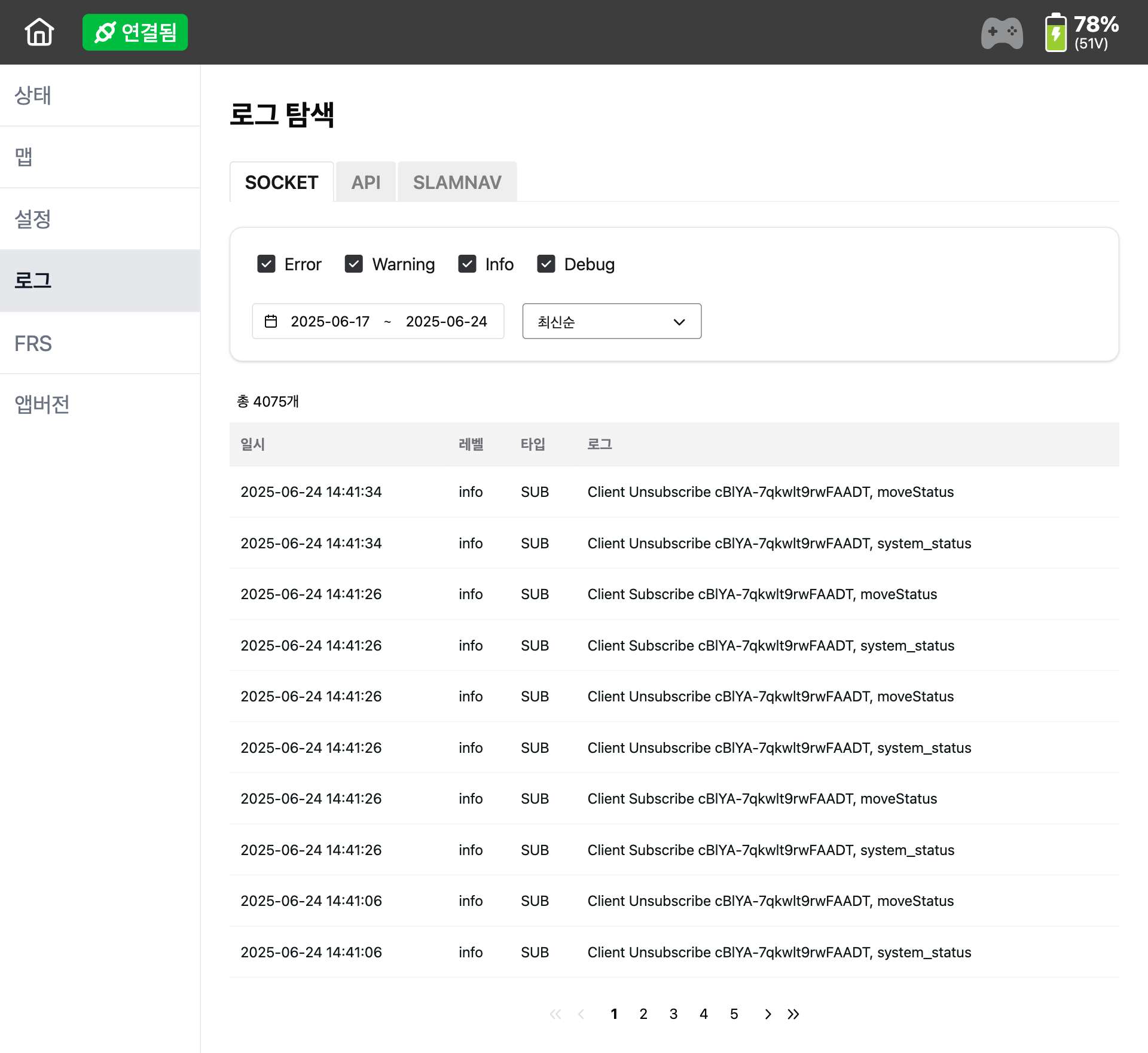
4.1 로그 종류 선택
상단 탭을 통해 로그의 종류를 선택할 수 있습니다.
- SOCKET: 소켓 통신 관련 로그
- API: API 호출 관련 로그
- SLAMNAV: SLAM 네비게이션 관련 로그
4.2 로그 필터
- 로그 레벨별 필터링이 가능합니다:
✅ Error / ✅ Warning / ✅ Info / ✅ Debug - 기간 필터를 통해 시작일과 종료일을 지정할 수 있습니다.
- 정렬 기준을 최신순 또는 과거순으로 설정할 수 있습니다.
4.3 로그 목록
- 아래 영역에는 필터링된 로그가 시간 순서대로 나열됩니다.
- 각 로그는 다음의 항목을 포함합니다:
- 타임스탬프 (예: 2025-04-16 21:36:21)
- 레벨 (debug, info 등)
- 이벤트 (예: CONNECT)
- 메시지 (예: FRS emit Status : RB-M-SRV-2401033...)
ℹ️ 로그는 시스템 분석, 장애 추적 및 동작 검증에 활용됩니다.
5. FRS 탭
FRS 탭은 로봇이 연결된 WiFi 정보와 관련된 설정을 관리하는 공간입니다.
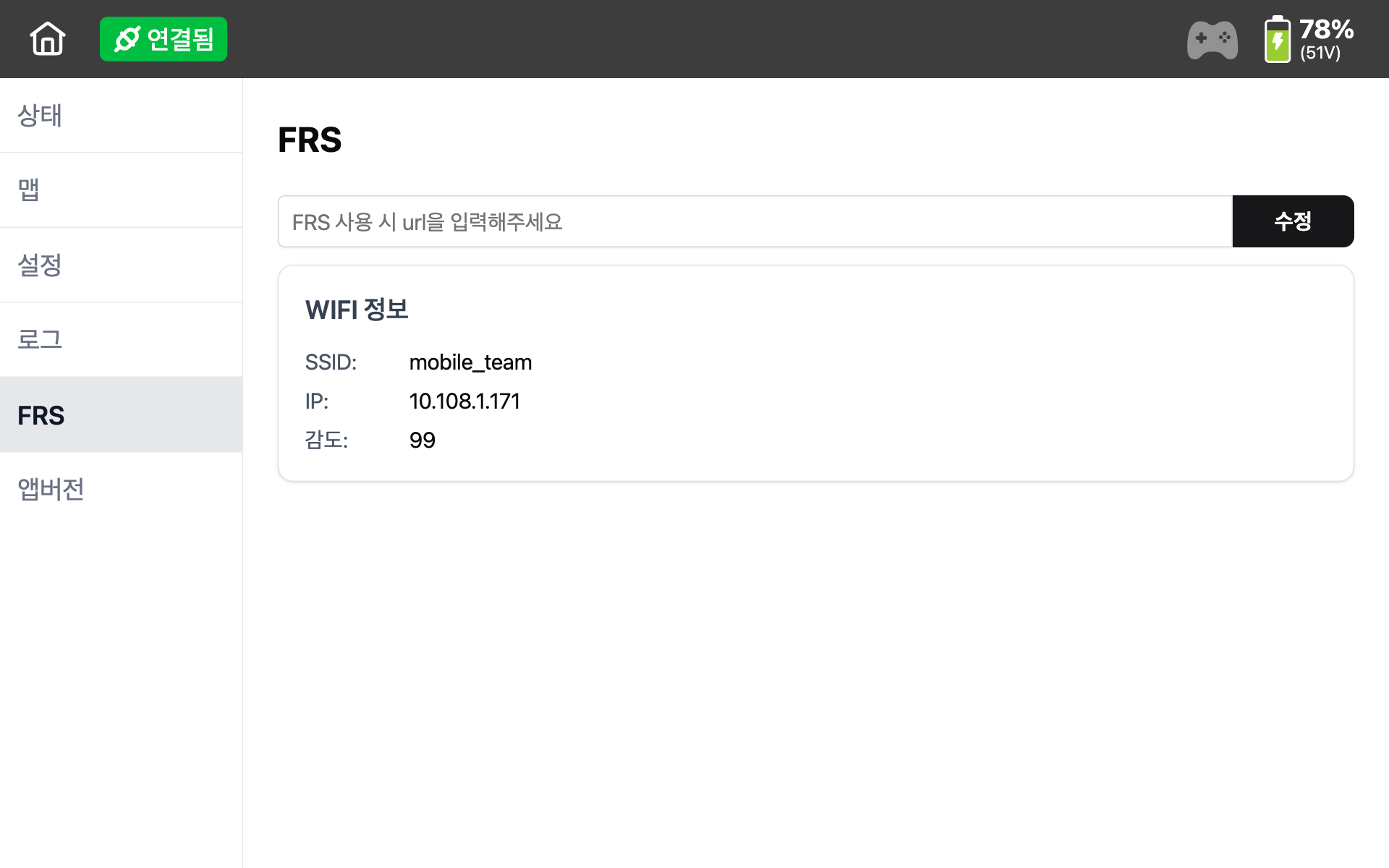
5.1 FRS 서버 주소
- 상단 입력창에 FRS 서버 주소를 입력할 수 있으며, [수정] 버튼을 통해 반영할 수 있습니다.
- 예시:
http://10.108.1.180
5.2 WiFi 정보
화면 하단에는 현재 연결된 WiFi 정보가 표시됩니다.
| 항목 | 설명 |
|---|---|
| SSID | 연결된 WiFi의 네트워크 이름 |
| IP | 로봇에 할당된 IP 주소 |
| 감도 | WiFi 신호 세기 (0~100 범위의 정수) |
⚠️ 신호 감도가 낮을 경우, 로봇 제어 및 스트리밍 품질에 영향을 줄 수 있습니다.
신호가 불안정할 경우, WiFi 공유기 위치 변경 또는 네트워크 점검이 필요합니다.
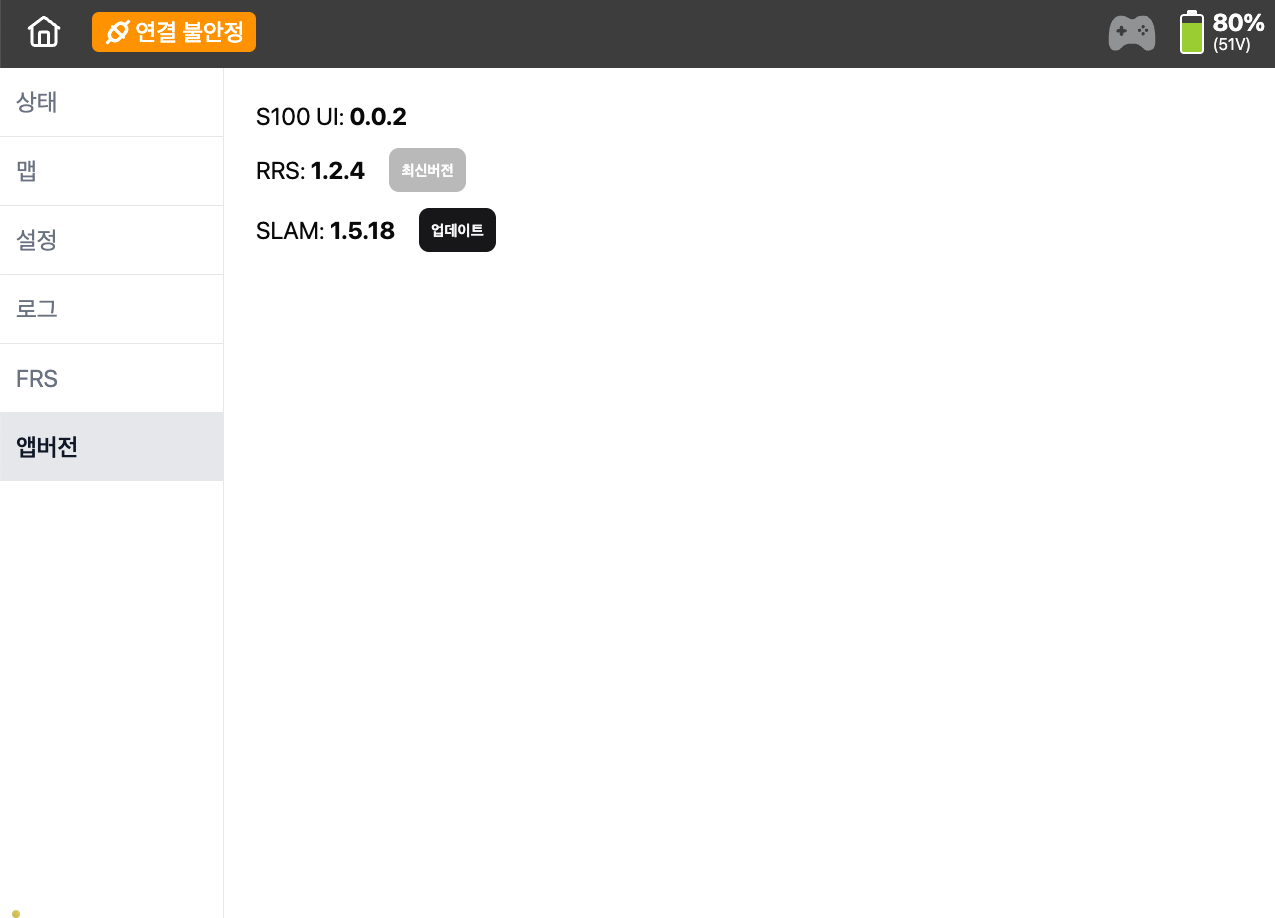
6. 앱버전 탭
앱버전 탭은 현재 사용하고 있는 프로그램의 버전을 확인할 수 있습니다.
6.1 버전 확인
- UI, 서버, SLAMNAV의 버전을 확인할 수 있습니다.
- 업데이트가 가능할 경우, 업데이트 버튼이 활성화됩니다.
이 사용자 매뉴얼은 시스템을 효율적이고 안전하게 운영하기 위한 안내를 제공합니다.
기술 지원이나 추가 문의 사항은 시스템 관리자에게 연락하시기 바랍니다.