2.1 작동 원리
위치 추정 방법
로봇의 위치 추정(Localization) 과정의 목표는 로봇이 현재 지도상에서 어디에 있는지를 알아내는 것입니다. 위치 추정을 위해 로봇은 다음의 두 가지 입력값을 사용합니다.
로봇의 초기 위치
이는 로봇의 위치를 추정하는 여러 기법에서 기준점으로 사용됩니다.
레이저 스캐너 데이터
지도에 표시된 벽과 현재 센서 데이터를 비교하여, 로봇이 있을 법한 위치를 판단하는 데 사용됩니다.
이러한 데이터들은 알고리즘을 통해 통합되어, 지도 위에서 로봇의 가장 가능성 높은 위치를 결정합니다.
모터 엔코더 (Encoder)
모터 엔코더의 데이터는, 로봇이 초기 위치에서부터 얼마나 이동했는지, 얼마나 회전했는지를 계산하는 데 사용됩니다. 이 두 데이터를 함께 사용하면 위치 추정의 정확도가 향상됩니다.
- 모터 엔코더는 각 구동 바퀴의 모터가 몇 번 회전했는지를 측정합니다. 모터가 한 번 회전할 때마다 바퀴는 그 둘레만큼 앞으로 이동하게 되므로, 인코더의 회전 수를 통해 로봇이 전진한 거리를 계산할 수 있습니다.
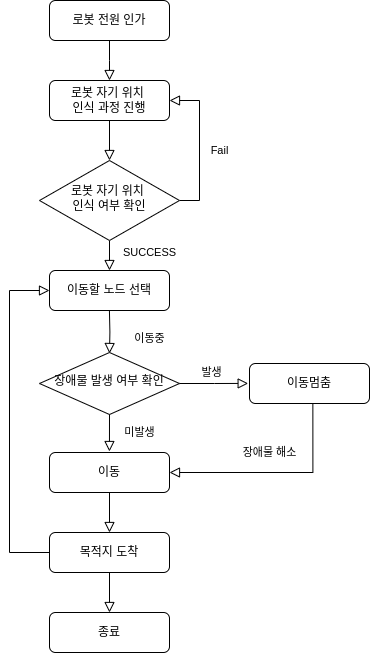
주행시퀀스 <이미지 변경 필요!!!!!>