3.4 로봇 작동시키기
위치 추정
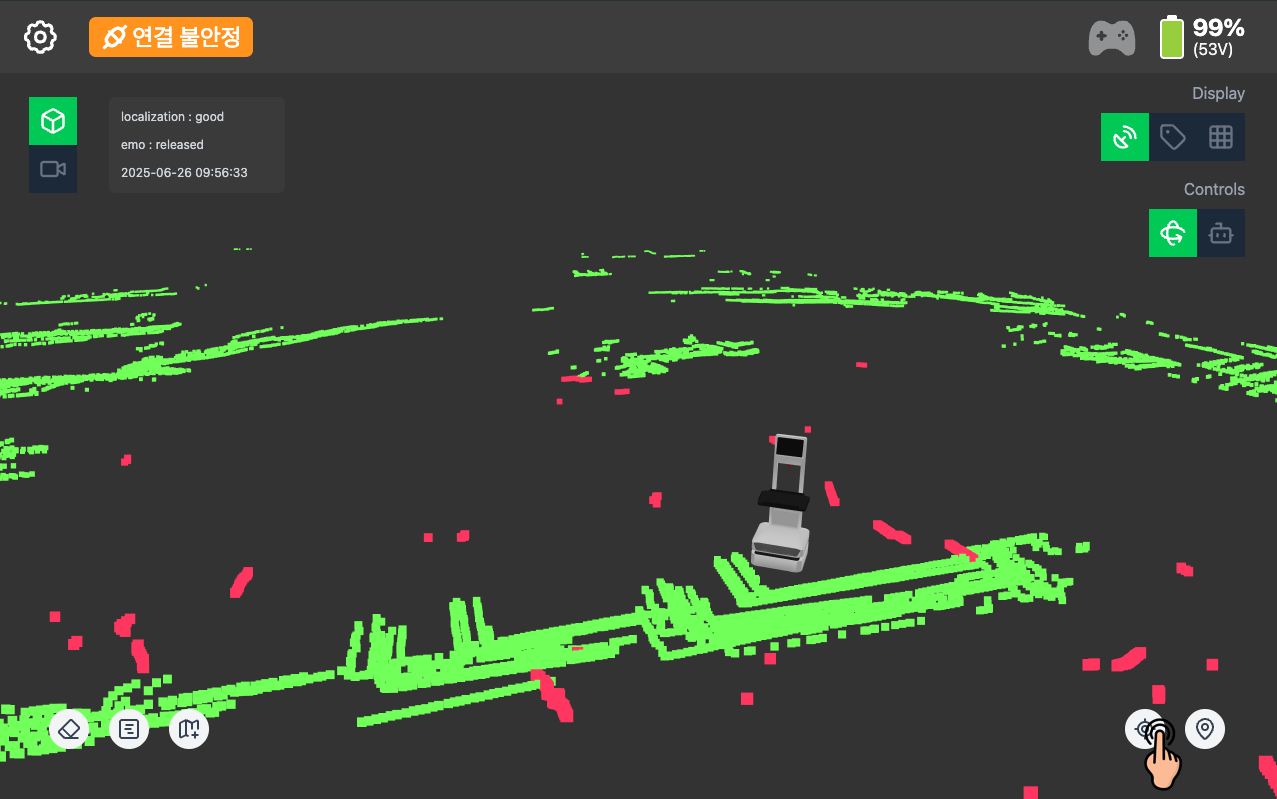
- Localization 아이콘 📍 (우측 하단) 클릭 → Localization 인터페이스 활성화
- 프리뷰 헬퍼 배치
- 마우스 좌클릭 또는 한 손가락 터치로 포즈(
x y z θ)를 조정합니다.
- 마우스 좌클릭 또는 한 손가락 터치로 포즈(
- [위치 추정] 버튼 클릭
- 추정 엔진이 헬퍼 포즈를 초기값으로 삼아 위치 보정을 수행합니다.
- 결과 확인
- 컬러 로봇이 헬퍼 위치로 스냅되고, 상태 카드가
good이면 성공입니다.
- 컬러 로봇이 헬퍼 위치로 스냅되고, 상태 카드가
- [닫기] 버튼을 누르면 편집 모드 로 복귀합니다.
목적지 선택
대기 중

- 상태 설명: 위치 초기화 성공 후 명령을 수행하기 전의 상태입니다.
- 표시 메시지:
대기 중 - 화면 안내:
이동 명령버튼이 표시됩니다. 버튼을 누를 시 이동 위치 팝업이 표시됩니다.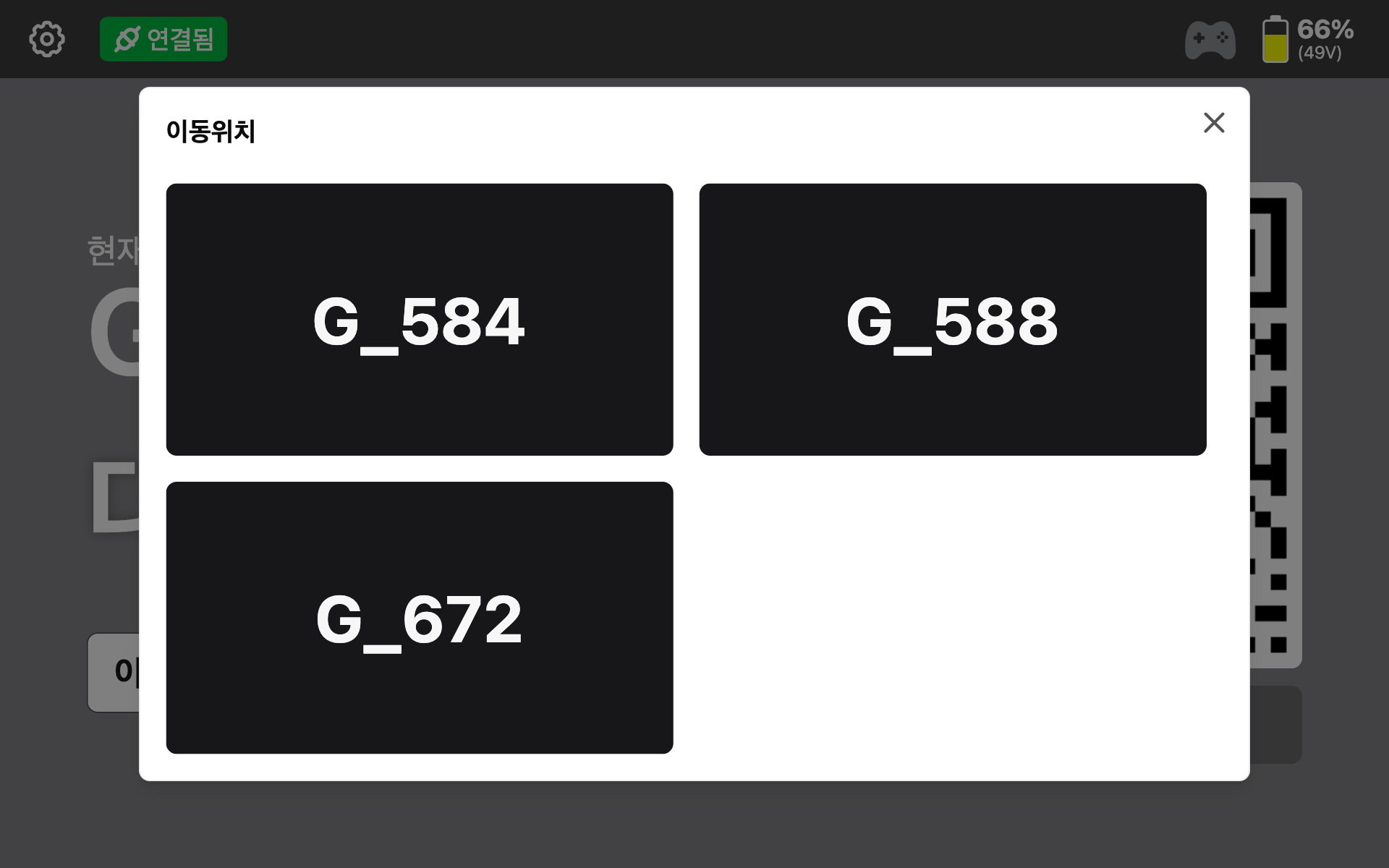
- 이동 위치 버튼 중 하나를 누르면 이동을 시작합니다.
- 이동 위치는 회사마다 상이합니다.
이동 중

- 상태 설명: 지정 위치로 이동하는 상태입니다.
- 표시 메시지:
이동 중 - 화면 안내: 일시정지 버튼을 누를 시 일시정지 화면으로 바뀝니다.