4.5 지도 생성(Mapping)
Mapping 기능은 라이다 센서를 통해 수집한 실시간 지형 데이터를 지도(정적 포인트 클라우드) 로 생성·저장하는 도구입니다.
시작 → 수집 → 중지 → 저장 의 네 단계로 이뤄지며, 저장 전까지는 언제든 재시작 및 재촬영이 가능합니다.
화면 구성
| 번호 | 요소 | 설명 |
|---|---|---|
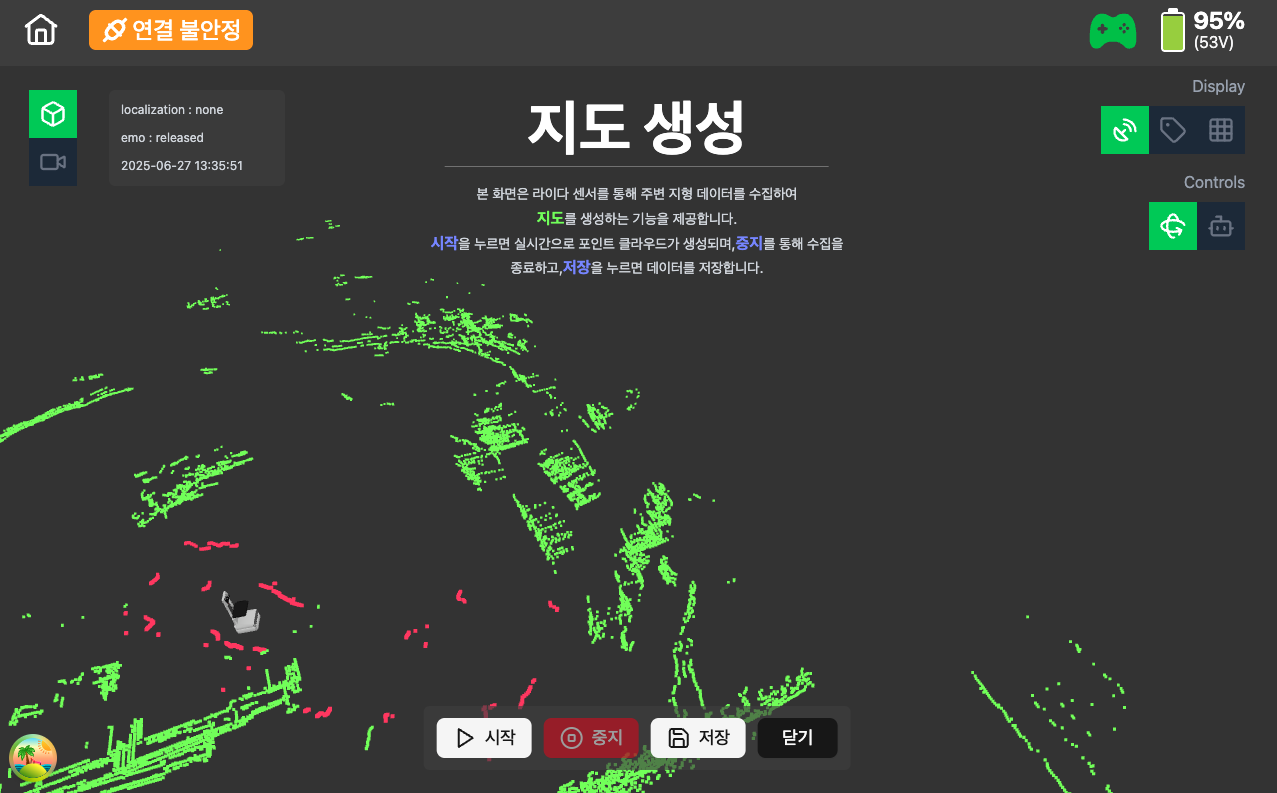
| ① | 타이틀 | 지도 생성 — 현재 모드(스캔/맵핑)를 명확히 표기하는 중앙 헤드라인 |
| ② | 가이드 문구 | Mapping 절차·버튼 용도를 요약 안내. 시작 → 수집 → 중지 → 저장 순서를 강조하여 사용자 혼동 방지 |
| ③ | 액션 패널 | ▶️ 시작 / ⏸️ 중지 / 🖫 저장 / ❌ 닫기 — 네 개 버튼이 일렬로 배치된 플로팅 컨트롤 영역 |
액션 패널은 ① 타이틀과 ② 가이드 하단, 뷰포트 중앙에 고정되어
스캔 진행 중에도 시야를 가리지 않으면서 즉시 접근 가능합니다.
사용 절차
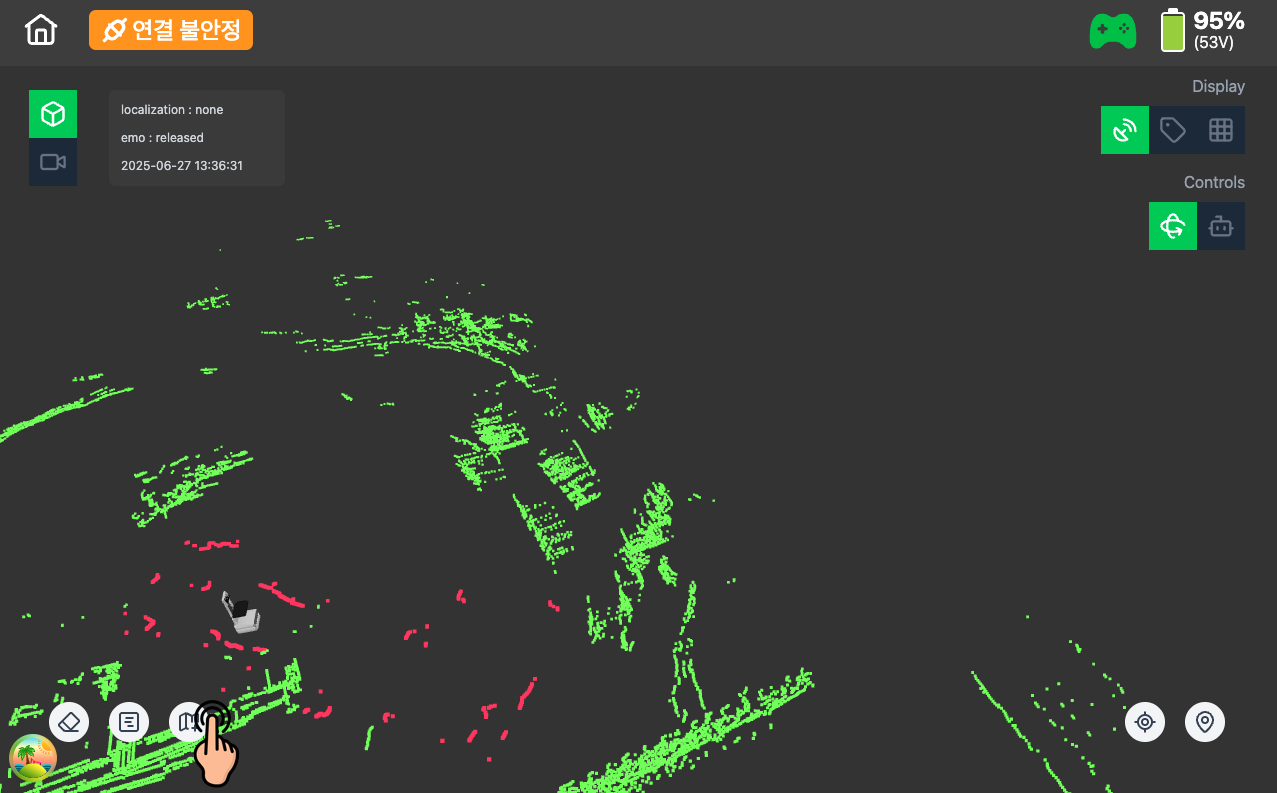
- Mapping 아이콘 🗺️ (좌하단) 클릭 → Mapping 인터페이스 활성화
- 안내 문구를 확인한 뒤 [시작] 버튼 클릭
- 실시간으로 포인트가 누적되며 공간이 스캔됩니다.
- 스캔을 멈추려면 [중지] 버튼 클릭
- 맵 품질을 확인한 뒤 [저장] 버튼 클릭
- 클라우드 데이터가 서버에 업로드되고, 편집 가능한 정적 맵으로 변환됩니다.
- 작업을 종료하려면 [닫기] 버튼 클릭 → 기본 화면으로 복귀
주요 버튼 설명
| 버튼 | 동작 |
|---|---|
| ▶️ 시작 | 실시간 스캔 시작 |
| ⏸️ 중지 | 스캔 정지 |
| 🖫 저장 | 클라우드 데이터를 서버에 저장 |
| ❌ 닫기 | Mapping 모드 종료 |
팁 & 주의 사항
- 스캔 중 로봇 이동 → 더 넓은 영역을 한 번에 취득할 수 있습니다.
- 중복 스캔은 자동으로 병합되지만, 동일한 위치를 과도하게 스캔하면 파일 용량이 커질 수 있습니다.
- 저장 후에는 Eraser로 불필요한 포인트를 삭제하거나, Annotation으로 노드를 배치할 수 있습니다.